
 产品:138
产品:138
 联系我们
联系我们

工博士提供了FANUC, Yaskawa, ABB,Kawasaki和 KUKA等各种新型机器人 。我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线或致电与我们联系 。
机器人程序中所有点的位置都和坐标系关联,同时这个坐标系也可能和另一个坐标系关联。
机器人的各种坐标系都由正交的右手定则来决定,如图3所示。当围绕平行于X 、Y 、Z 轴线的各轴旋转时,分别定义为A 、B 、C 。A 、B 、C 的正方向分别是X 、Y 、Z 正方向上右手螺旋前进的方向(见图4)。

图3 右手坐标系

图4 旋转坐标系
常用的坐标系是绝.对坐标系、机座坐标系、机械接口坐标系和工具坐标系。
(1)绝.对坐标系与机器人的运动无关,以地球为参照系的固定坐标系(见图5),符号为O 0、X 0、Y 0、Z 0。原点O 0、+X 0轴由用户根据需要来确定;+Z 0轴与重力加速度的矢量共线,但方向相反。
(2)机座坐标系是以机器人机座安装平面为参照系的坐标系,符号为O 1、X 1、Y 1、Z 1。原点O 1由机器人制造厂规定;+Z 1轴垂直于机器人机座安装面,指向机器人机体;X1轴方向由原点指向机器人工作空间中心点Cw(见GB/T12644—2001)在机座安装面上的投影。当由于机器人的构造不能实现此约定时,X 1轴的方向可由制造厂规定。
(3)机械接口坐标系是以机械接口为参照系,符号为O m、X m、Y m、Z m。原点O m是机械接口的中心;+Z m轴的方向垂直于机械接口中心,并由此指向末端执行器;+X m轴由机械接口平面和X 1、Z 1平面(或平行于X 1、Z 1图2 YASKAWA工业机器人各运动轴的关系图3 右手坐标系 图4 旋转坐标系图5 坐标系示例图6 工具坐标系的平面)的交线来定义,同时机器人的主、副关节轴处于运动范围的中间位置。当机器人构造不能实现此约定时,应由制造厂规定主关节轴位置。+X m轴的指向远离Z 1轴。
(4)工具坐标系以安装在机械接口上的末端执行器为参照系(见图6),符号为O t、X t、Y t、Z t。原点O t工具中心点(TCP);+Zt轴与工具有关,通常指工具指向;在平板式夹爪型夹持器夹持时,+Y t是手指运动平面的方向。
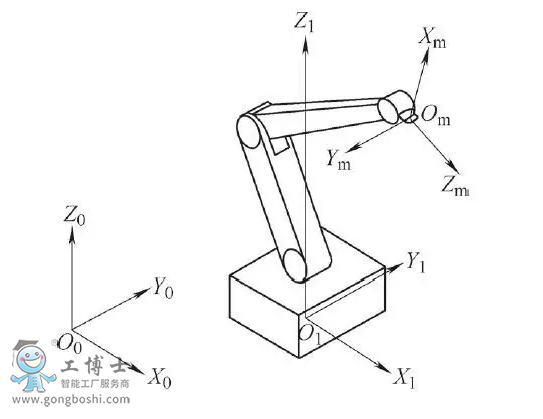
图5 坐标系示例

图6 工具坐标系
图6 工具坐标系
了解更多可点击咨询:ABB机器人伺服电机、ABB机器人保养、ABB机器人配件服务商
- 下一篇:工业机器人常用坐标系
- 上一篇:工业机器人各运动轴的解释以及各运动轴的关系!