
 产品:138
产品:138
 联系我们
联系我们

本文主要介绍了工业机器人运动轴的命名、坐标系的确定原则及其常用种类,以期对工业机器人的应用起到一定的参考。
机器人运动轴
工业机器人在生产中,一般需要配备除了自身性能特点的外围设备,如转动工件的回转台,移动工件的移动台等。这些外围设备的运动和位置控制都需要与工业机器人相配合并要求相应精度。通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装轴,基座轴和工装轴统称外部轴。
机器人轴是指操作本体的轴,属于机器人本身,目前商用的工业机器人大多以8轴为主。基座轴是使机器人移动轴的总称,主要指行走轴( 移动滑台或导轨)。工装轴是除机器人轴、基座轴以外轴的总称,指使工件、工装夹具翻转和回转的轴,如回转台、翻转台等。实际生产中常用的是6关节工业机器人,该操作机有6个可活动的关节(轴)。附表与图1为常见工业机器人本体运动轴的定义,值得注意的是,不同的工业机器人本体运动轴的定义也不同。用于保证末端执行器达到工作空间任意位置的轴称为基本轴或主轴;用于实现末端执行器任意空间姿态的轴,称为腕部轴或次轴;图2是YASKAWA工业机器人各运动轴的关系。
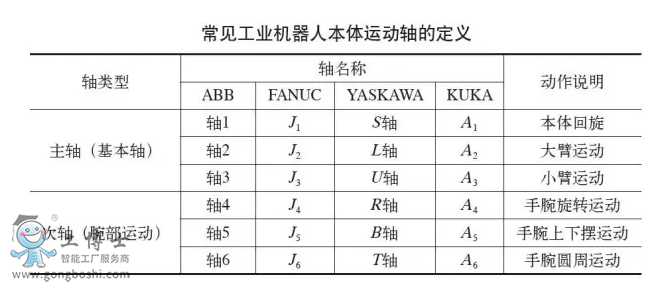
图1 典型机器人各运动轴

图2 YASKAWA工业机器人各运动轴的关系
了解更多可点击咨询:ABB机器人伺服电机、ABB机器人保养、ABB机器人配件服务商
- 下一篇:工业机器人坐标系如何进行确定?
- 上一篇:ABB工业机器人位置数据精析详解!