
 产品:138
产品:138
 联系我们
联系我们

1、坐标系选择
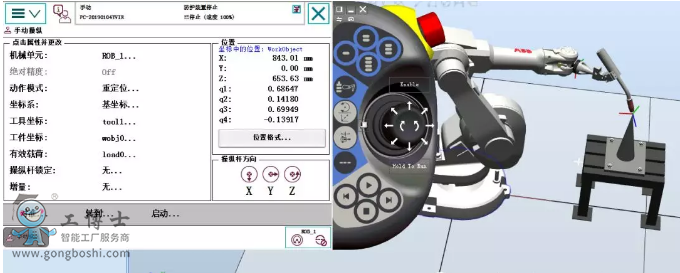
说明:对于ABB机器人工具坐标系验证,这里使用重定位进行验证新建工具的TCP,坐标系统一使用基座标系,因为基座标系可以确定其方向;对于工件坐标系使用默认的wobj0,工具要选择需要验证的工具,如下图验证工具tool1坐标系选择。

说明:这里操作机器人分别绕着基座标系的X、Y、Z轴做选择运动,观察工具TCP点和外部固定尖点的距离变化。这里利用重定位,就是利用重定位时候,机器人工具TCP点基本不变,然后改变机器人的姿态,验证机器人从不同的姿态时候工具TCP是否满足要求,TCP的质点大小范围;从这里也印证了为什么建立工具坐标系时候,机器人要尽可能地从不同差别姿态,把机器人要建立的工具TCP点和外部固定尖点重合,而且不同姿态点数越多计算越好。验证时候,机器人只要分别绕着坐标系的X、Y、Z轴做旋转运动,工具TCP和外部固定尖点偏差不要超过实际需要的精度即可。
绕基座标Y轴重定位运动图1:

- 下一篇:ABB机器人4大控制方式,你知道几种?
- 上一篇:ABB机器人工具坐标系建立方法介绍