产品:138
产品:138
 联系我们
联系我们

1)现场有切割等工艺,对轨迹精度要求较高,如果机器人轨迹出现锯齿等抖动造成的现象,如何处理?
2)除了把tcp作准(或者用数模导入),是否还有方法提高轨迹精度?
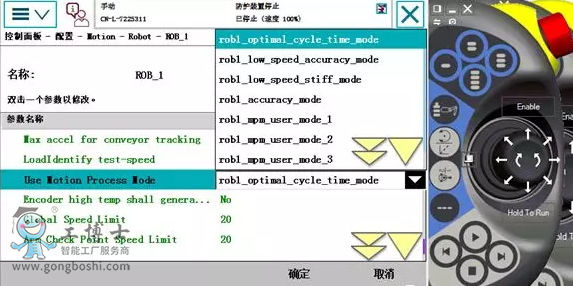
3)ABB机器人提供了四种运动模式供选择,也可自定义
运动进程模式由一套特定的机器人微调参数组成。每套微调参数(也就是每种模式)都会针对特定的应用等级来优化机器人的微调。
预定义了下列模式:
· Optimal cycle time mode – 此模式产生可能的*短循环时间,通常是默认模式。· Accuracy mode – 此模式提高了路径准确度。相较Optimal cycle time mode,循环时间将稍稍增加。这是提高小型和中型机器人(比如,IRB 2400和IRB 2600)路径准确度的建议选项。
· Low speed accuracy mode – 此模式提高了路径准确度。相较Accuracy mode,循环时间将稍稍增加。这是提高大型机器人(比如,IRB 4600)路径准确度的建议选项。
· Low speed stiff mode-建议在*大伺服器刚性具有重要意义的接触应用中使用该模式。此外也可用于某些想尽量减少路径波动的低速应用。该模式的周期时间要久于Low speed accuracy mode。
4)如何修改motionprocess mode?
5)示教器-控制面板-配置,主题选择motion,找到robot