ВњЦЗ:138
ВњЦЗ:138
 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ

ABBЙЄвЕЛњЦїШЫХізВМьВтжївЊЙІФмНщЩмЃК
Collision Detection ХізВМьВтЕФжївЊзїгУЪЧМѕЩйХізВСІЖдЛњЦїШЫБОЬхЕФгАЯьЃЌБмУтЛњЦїШЫБОЬхЛђепЭтЮЇЩшЫ№ЛЕЁЃ
ЫќБШвЛАуЕидЫЖЏеьВтЙІФмИќЮЊСщУєЃЌЕБХізВЗЂЩњЪБЃЌЛњЦїШЫЛсСЂМДЭЃжЙЃЌВЂбижЎЧАЕФаазпТЗОЖЭљЗДЗНЯђвЦЖЏвЛаЁЖЮОрРывдЪЭЗХВагргІСІЁЃЕБХізВБЈОЏБЛШЗШЯжЎКѓЃЌВЛашвЊжиаТЩЯЕчЃЌЛњЦїШЫОЭПЩвдМЬајбизХжЎЧАЕФТЗОЖМЬајЙЄзїЁЃ

ЛњЦїШЫзіКУЙьМЃКѓЃЌПЩвдЭЈЙ§ХізВМьВтРДМьВщЛњЦїШЫЙЄОпЪЧЗёКЭЙЄМўХізВЃЌШчЯТЭМЃЌЛњЦїШЫЙЄОпдкИУЮЛжУгыЙЄМўЯрзВ
2ЃЉStep 02
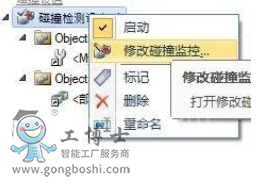
ЗТец-ДДНЈХізВМрПи

3ЃЉStep 03
АбвЊМьВтЕФСНИіЖдЯѓЭЯШы

4ЃЉStep 04
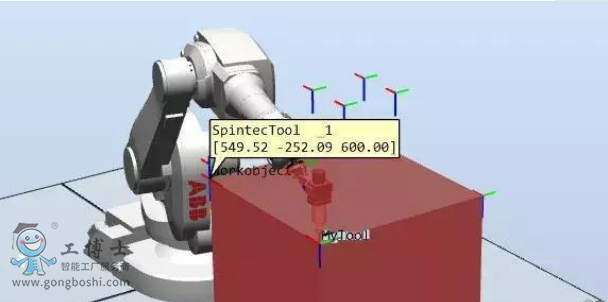
гвЛїЃЌЩшжУ
5ЃЉStep 05
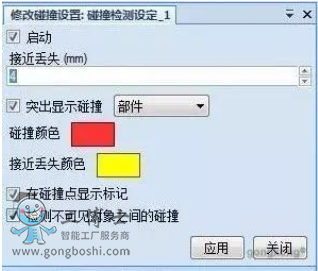
аоИФХізВЬсЪОЕФбеЩЋЕШЁЃ
6ЃЉStep 06
гаЪБКђЙЄОпЕШвВВЛФмЬЋНгНќЙЄМўЃЌНгНќЖЊЪЇМДЩшжУЙЄОпКЭЙЄМўдкИУЗЖЮЇФкЃЌБЈОЏ