
 产品:138
产品:138
 联系我们
联系我们

工博士机器人技术有限公司是包括FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的致力于帮助您解决一切机器人方面的问题,让制造更简单。
ABB机器人
赋值指令要点
说明:这里仅仅对赋值指令做一下说明,赋值指令是用得比较多的指令之一,不特别在于计算、算法时候。赋值指令要点
目录
一、概念作用
1、赋值概念
2、赋值指令说明举例
二、举例使用
1、举例程序
2、示教器验证图片
三、使用注意要点
一、赋值指令概念
1、赋值概念
“:=”赋值指令用于程序数据的赋值操作,即分配一个数值,“:=”指令用于向数据分配新值,该值可以是一个恒定值,亦可以是一个算术表达式;常用于如布尔量、数字量、位置数据等的程序数据进行赋值。
“:=”赋值指令和数学上面的“=”等号作用基本一致,主要是通过赋值指令,把赋值后面的结果赋给前面的对象。
2、赋值指令说明举例
布尔量赋值:Flag1:=TRUE;
常量赋值:num1:=10;
数学表达式赋值:reg1:=1+reg2、reg1:=reg1+reg2;
位置数据的赋值:pActual:=pHome;
数据记录组件的赋值:p10.trans.x := 200;
组输出信号的赋值:Go01:= 15;
二、赋值指令使用举例
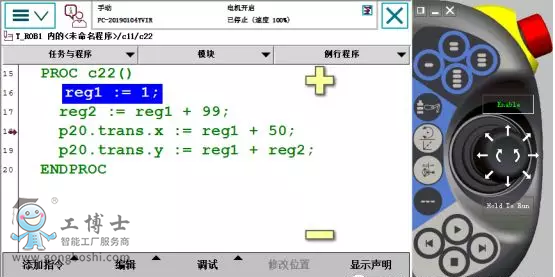
1、举例程序
PERS robtarget p20:=[[862.17,0.00,1152.50],[0.5,2.58096E-08,0.866025,1.49012E-08],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
PERS num reg1:=0;
PERS num reg2:=0;
PROC c21()
reg1 := 1;
reg2 := reg1+99;
p20.trans.x := reg1 + 50;
p20.trans.y := reg1 +reg2;
ENDPROC
2、示教器验证图片
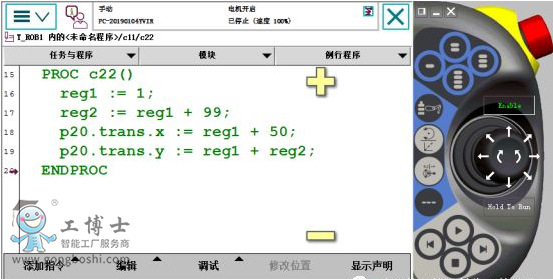
(1)执行程序前两行指令时候
(2)程序数据中reg1、reg2值

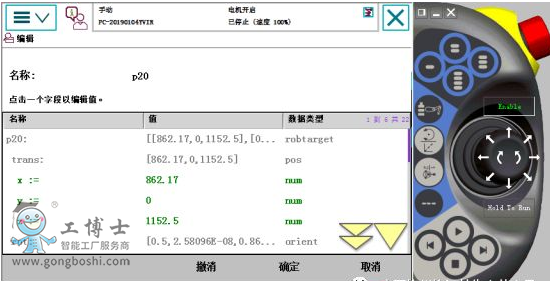
(3)p20赋值指令前的值
p20.trans.x=862.17
p20.trans.y=0
程序执行图片:
P20执行前数据图片:
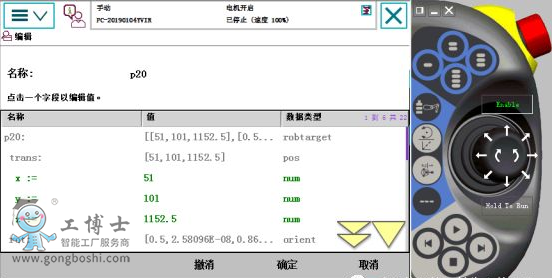
(4)运行赋值指令后的值
p20.trans.x=51
p20.trans.y=101
三、赋值指令要点
1、赋值指令作用是数学运算,进行加减乘除等运算;
2、赋值指令是等号后面结果赋值给等号前面,等好后面可以是单一某个数据类型的数据,也可以是一个表达式;
3、绝大多数程序数据类型都可以使用赋值指令进行数学运算,但是赋值指令等号后面的数据类型必须和等号前面数据类型相同;
4、赋值指令等号前面必须为变量或者可变量,赋值指令等号后面常量、可变量、变量都可以;
了解更多ABB机器人信息可点击咨询:ABB机器人配件售后技术服务商