
 产品:138
产品:138
 联系我们
联系我们

ABB的核心技术是运动控制系统,这也是对于机器人自身来说大的难点。掌握了运动控制技术的ABB可以轻易实现循径精度、运动速度、周期时间、可程序设计等机器人的性能,大幅度提高生产的质量、效率以及可靠性。
1)导入焊枪几何体(一个动臂,一个静臂)
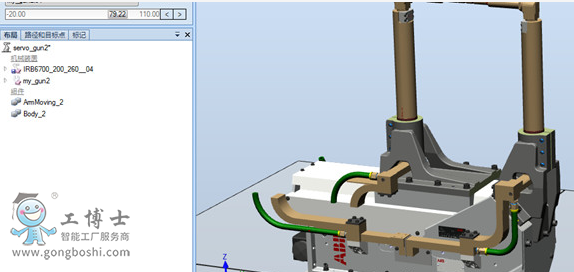
3)修改名字,类型选择工具
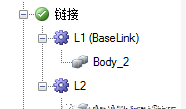
4)添加链接
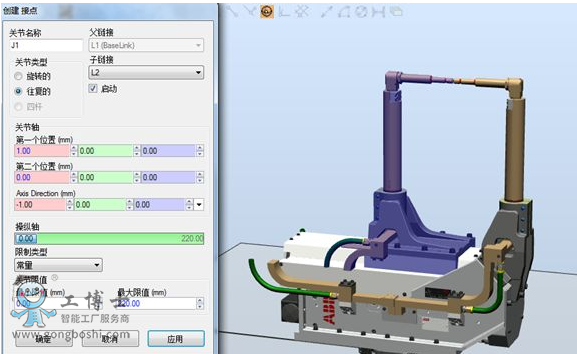
5)修改接点
7)完成编译
8)拖入机器人本体,创建系统
9)导入s_gun参数:…\ABB.RobotWare-6.07.0130\RobotPackages\RobotWare_RPK_6.07.0130\utility\AdditionalAxis\ServoGun\DM1\M7L1B1S_DM1.cfg
10) 重启系统,弹出提示框,关联刚才做好的焊枪工具。
