
 ІъЖ·:138
ІъЖ·:138
 БӘПөОТГЗ
БӘПөОТГЗ

ABBөДәЛРДјјКхКЗФЛ¶ҜҝШЦЖПөНіЈ¬ХвТІКЗ¶ФУЪ»ъЖчИЛЧФЙнАҙЛөҙуөДДСөгЎЈХЖОХБЛФЛ¶ҜҝШЦЖјјКхөДABBҝЙТФЗбТЧКөПЦСӯҫ¶ҫ«¶ИЎўФЛ¶ҜЛЩ¶ИЎўЦЬЖЪКұјдЎўҝЙіМРтЙијЖөИ»ъЖчИЛөДРФДЬЈ¬ҙу·щ¶ИМбёЯЙъІъөДЦКБҝЎўР§ВКТФј°ҝЙҝҝРФЎЈ
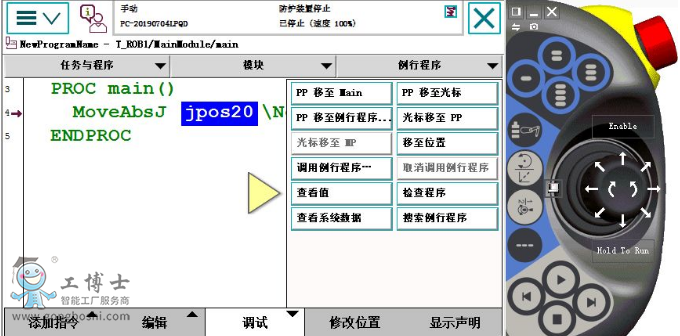
ПВГжҪйЙЬөДКЗABB»ъЖчИЛөзіШёь»»әуИзәОҪ«»ъЖчИЛҝмЛЩ»ШБгіМРтReference
1ЎўКЧПИТӘҪЁБўТ»ёц№ШҪЪО»ЦГКэҫЭЈ¬ФЪABBЦчТіСЎФсіМРтКэҫЭ

ЈЁұёЧўЈәjointtargetКЗТФ»ъЖчИЛёчёц№ШҪЪЦөАҙјЗВј»ъЖчИЛО»ЦГЈ¬іЈУГУЪ»ъЖчИЛФЛ¶ҜЦБМШ¶ЁөД№ШҪЪҪЗЎЈЈ©








БЛҪвёь¶аРЕПўҝЙөг»чЧЙСҜЈәABB»ъЖчИЛЈ¬ABB»ъЖчИЛұЈСшЈ¬ABB»ъЖчИЛЕдјю·юОсЙМ