
 产品:138
产品:138
 联系我们
联系我们

本篇文章我们来讲解一下运用EPS功能所对应的硬件和软件要求。
一、硬件安装
1、I / O连接器数据
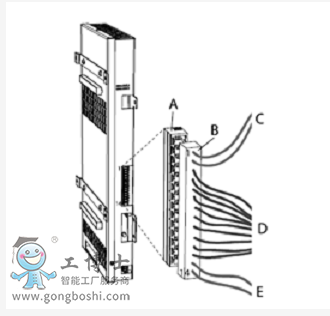
A、安全控制器上的I/O连接器
B、连接插头
C、电源
D、5安全输出(双链输出,10个信号)
E、同步开关(双链信号)
我们单独来看它各引脚的用途:
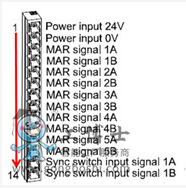
出于安全考虑,所有的输出信号都有冗余度,即输出信号1A和输出信号1B应该始终相同,如果它们传输状态相差超过100毫秒,就会出现内部错误,从而导致机械部件停止。
2、I / O信号连接
(1)使用输入信号
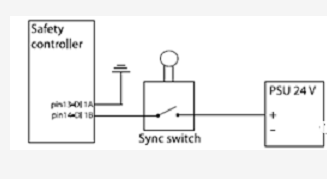
安全控制器需要一个输入信号进行循环同步检查。从同步开关连入一个信号,当机器人处于同步位置时,引脚14应该被置于高电平,引脚13应该被置于低电平。如果不使用双通道布线,只连接引脚14。
同步开关采用双输入信号(利用引脚13和14)连接到安全控制器原理图:

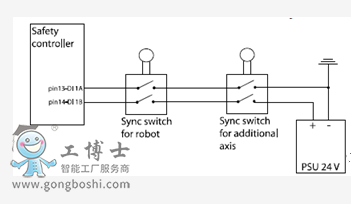
(2)使用输出信号
该安全控制器有5个双链输出信号,用来监控相应的轴是否在定义的范围内。在进行安装时,必须确保当轴超出允许的范围时,这些信号会使机器人停止。
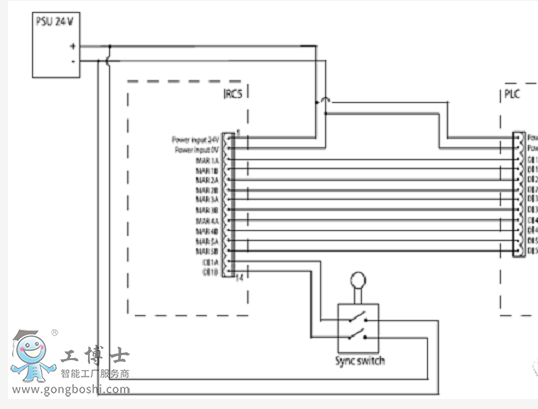
将输出信号连接到PLC或类似的设备上,当信号处于低电平时,PLC或类似的设备可以停止机器人的运动。
信号与PLC的连接原理图如下:

RobotStudio的版本必须与使用的RobotWare版本相同,或高于RobotWare的版本
EPS配置向导与RobotStudio一起安装,其操作请参考手册Operating manual - Getting started, IRC5 and RobotStudio。EPS配置向导可以在RobotStudio的在线选项卡中找到。EPS的功能选项为:810-1 Electronic Position Switches。
了解更多:ABB机器人配件