
 产品:138
产品:138
 联系我们
联系我们

一、查看当前机器人坐标:
1.TCP(Tool Center Point)工具座标系是机器人运动的基准。
2.机器人的工具坐标系是由工具中心点TCP与坐标方位组成,机器人连动时,TCP是必需的。
3.当机器人夹具被更换,重新定义TCP后,可以不更改程序,直接运行。但是当安装新夹具后就必需要重新定义这个坐标系了。否则会影响机器人的稳定运行。
4.系统自带的TCP坐标原点在第六轴的法栏盘中心,垂直方向为Z轴,符合右手法则。注意:在设置TCP座标的时候一定要把机器人的操作模式调到“手动限速模式”
TCP(Tool Center Point)工具座标系的设定步骤
END
注意事项
如何在示教器上选择设定好的TCP坐标:1.在操纵窗口上,将光标下移到“tool”选项上,然后按回车进入选择界面。2.在该界面上可以看见刚才设定的工件坐标,选择它按回车确定。
注意:在设置TCP座标的时候一定要把机器人的操作模式调到“手动限速模式”
二、3D相机坐标:
1. 空间表示一个位姿,通常需要XYZABC来表示(其中ABC分别为RZ,RY,RX的欧拉角)
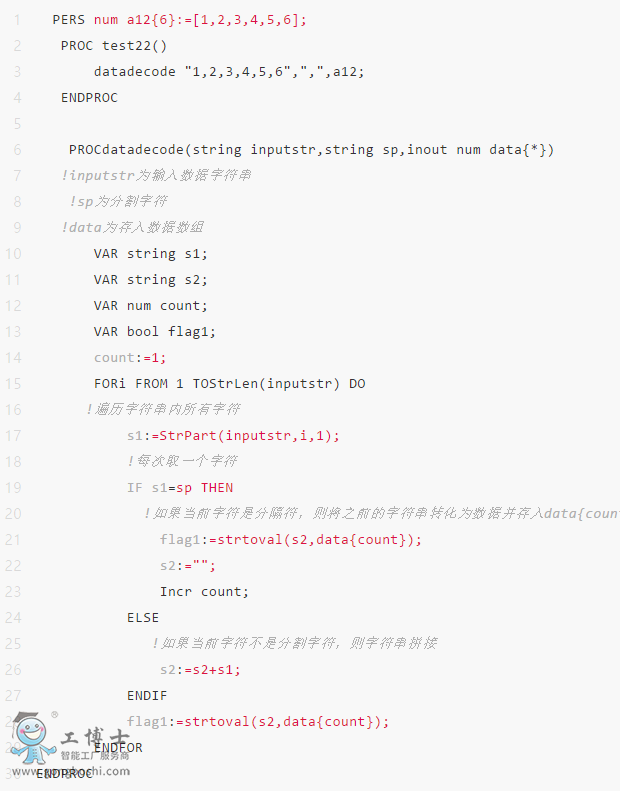
2. 3D相机通过socket发送如下形式坐标:1,2,3,4,5,6 (”,”为分隔符),ABB机器人如何通过socket接受以上数据并存储到对应数组内容,并将对应数据转化为机器人点位Robtarget?
3. 对于接收到的字符串1,2,3,4,5,6,可以使用如下代码解析并存入数组a12中
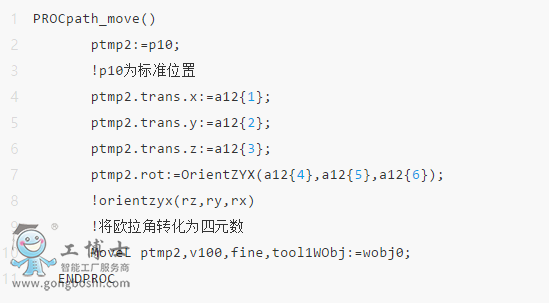
4. 对于存入数组a12中的数据,可以通过如下代码赋值到对应robtarget并移动机器人
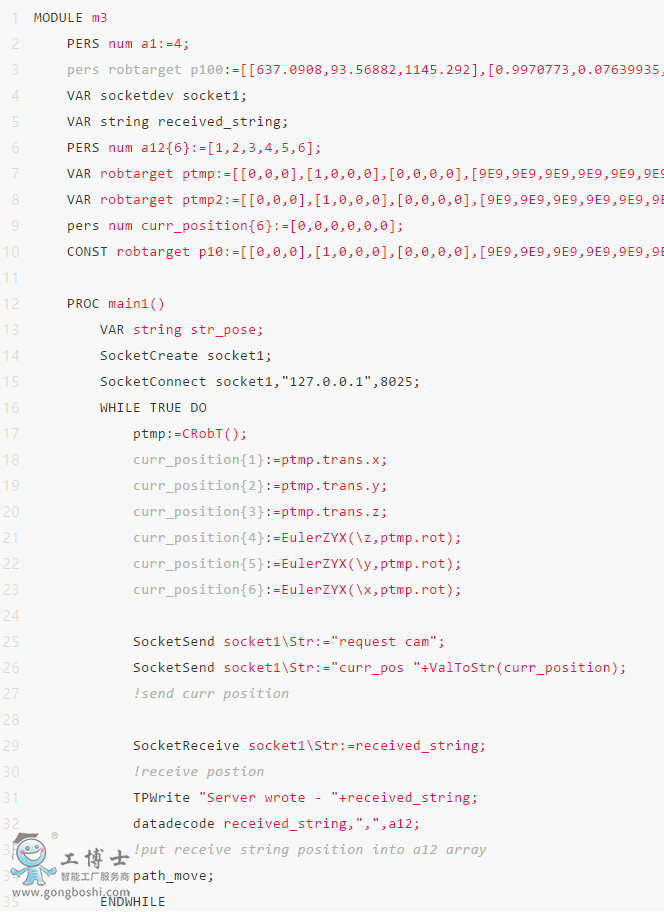
5. 完整通过socket接受3D相机坐标并移动示例代码如下:

工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种品牌机器人和常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理品牌于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
工博士是ABB机器人的一级代理商,服务于ABB机器人销售、ABB机器人周边设备配套、ABB机器人售后技术服务
了解更多信息可点击咨询:ABB机器人保养,ABB机器人维修一站式综合采购平台