
 产品:138
产品:138
 联系我们
联系我们

工博士提供了FANUC, Yaskawa, ABB,Kawasaki和 KUKA等各种新型机器人 。我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线或致电与我们联系 。 ABB机器人传输实数数据的方式大致可以分为两种:
一、使用模拟量输出信号传输实数数据,由于模拟量信号自身抗干扰性能差,并且需要加装价格昂贵的模量信号扩展模块,因此,在传输大量的实数数据的场合中,一般很少使用模拟量信号;
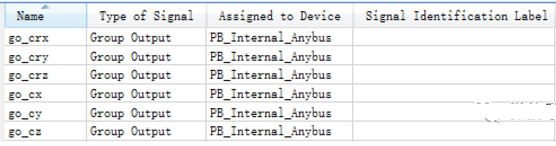
二、使用组输出信号传输实数数据,组输出信号不仅可以通过加装价格相对低廉的数字量I/O信号扩展模块实现,也可以通过加装现场通信模块的方式实现。本例,使用第二种方式,通过ProfiBus现场总线通信的形式来传输机器人当前位置数据。
由于机器人当前位置数据都是32位的单精度实数类型,所以,我们定义的每一个组输出信号长度也应该是32位。
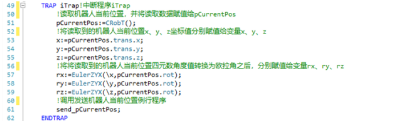
创建中断子例行程序,并在其中编写读取机器人当前位置x、y、z坐标数据程序。由于ABB机器人系统中使用四元数形式表示TCP绕相应坐标轴的旋转角度,因此,这里需要使用EulerZYX指令将以四元数形式表示的角度数据转换为欧拉角形式表示的旋转角度数据。完整的中断子程序代码如下所示。

ABB机器人在很多行业已经代替了人工生产,越来越多的生产场所由于人工成本的上升或者自身生产环境恶劣等因素而引进工业机器人。作为机械设备,工业机器人的保养是非常重要的,正确的保养方式可以让机器人的使用寿命延长,并且可以提高生产效率。