
 产品:138
产品:138
 联系我们
联系我们

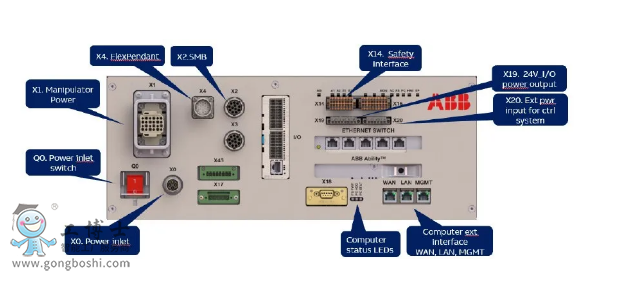
今天我们要一起学习的是一款ABB推出的控制器的接口,更小的占地面积,更智能互联的产品性能,要想用上这款OmniCore控制器,你就不能不学习它的各个接口配置哦!话不多说,让我们来具体了解下吧!

这款OmniCore控制器不仅承袭了我们业内的运动控制和路径精度,占地面积更是缩小了50%,同时也使安装灵活性和空间利用率大化。我们的机器人控制器具备ABB一如既往的高精度、短节拍和高速度优势,可应对棘手的挑战。OmniCore小型机器人控制器使机器人能够更高效地执行任务。下面一起来学习下这款控制器的接口吧!

|
接口 |
功能 |
|
Q0 |
总开关 |
|
X0 |
系统电源输入(220v 单相) |
|
X1 |
连接机器人本体动力电缆 |
|
X2 |
SMB反馈线 |
|
X3 |
力控反馈线 |
|
X4 |
示教器连接 |
|
X14 |
安全接口(外部急停,自动停止等) |
|
X15 |
可选项,Motor On输入及Motor输出信号 |
|
X17 |
可选项,DeviceNet接口 |
|
X18 |
可选项,现场总线适配器 |
|
X19 |
24V输出 |
|
X20 |
外部输入24v |
|
X45 |
可选项,24v输出 |
|
MGMT |
服务端口,IP:192.168.125.1 |
除了提高安装灵活性之外,ABB OmniCore控制器还提升了柔性,以整合新的数字化技术。这款控制器用途广泛,扩展性佳,可配备业内多种附加选项,如现场总线协议、视觉解决方案和力控技术。
了解更多可点击咨询:ABB机器人伺服电机、ABB机器人保养、ABB机器人配件服务商