
 产品:138
产品:138
 联系我们
联系我们

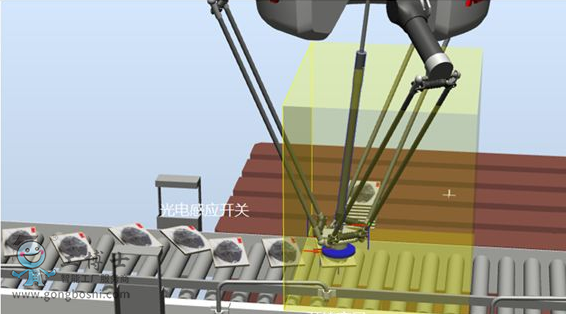
1. 输送链跟踪时,通常是产品经过光电感应开关,输送链知道产品来,存入队列。当产品进入开始窗口时,机器人开始跟踪

3. 当产品进入开始窗口时,组输入c1cntfromenc 会更新为当前输送链编码器值。故只需要记录两次产品进入开始窗口时的编码器值,做减法即可。
6. 由于每次只有产品进入开始窗口,组输入c1cntfromenc才会更新,故可以使ISignalGIc1cntfromenc,intno2; 来触发中断
7. 代码如下:
PROCinit()
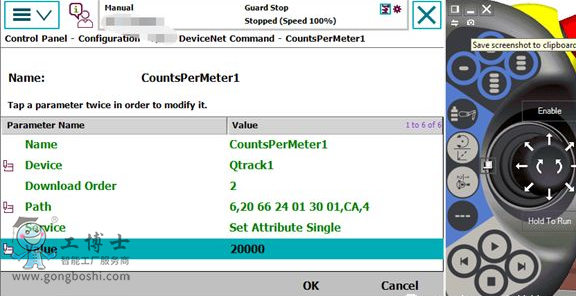
ReadCfgData "/EIO/DEVICENET_COMMAND/CountsPerMeter1","VALUE",s1;
!读取参数CountsPerMeter1,存入字符串
flag1:=StrToVal(s1,countspermeter1);
!将字符串转为数据
Idelet intno2;
CONNECTintno2 WITH get_gicounter;
ISignalGI c1cntfromenc,intno2;
!通过组输入变化触发中断
ENDPROC
TRAPget_gicounter
en_counter1:=ginputdnum(c1cntfromenc);
TPWrite "distancebetween two strobe "\dNum:=(en_counter1-en_counter2)/countspermeter1*1000;
en_counter2:=en_counter1;
!将上一次编码器值记录
endtrap